Traxial blog
Why design-for-manufacture could make Traxial axial flux motors go mainstream
The following article was originally published by Emobility Engineering magazine, published April 11, 2024 Read the original article Touted as the future of EV propulsion, axial flux motors are more…
Axial Flux Motors: Revolutionizing Electric Vehicles for a Greener Future
As the electric vehicle growth continues unabated, the rising fuel prices due to supply chain disruptions and political tensions will continue to incentivize consumers to consider more fuel-efficient battery electric…
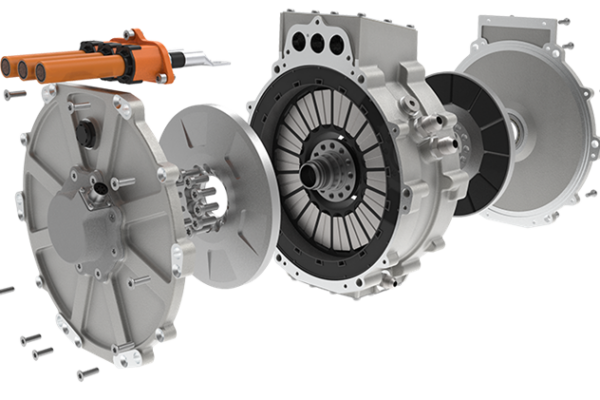
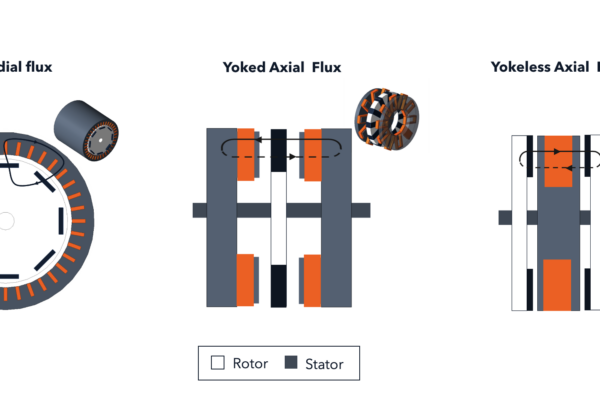
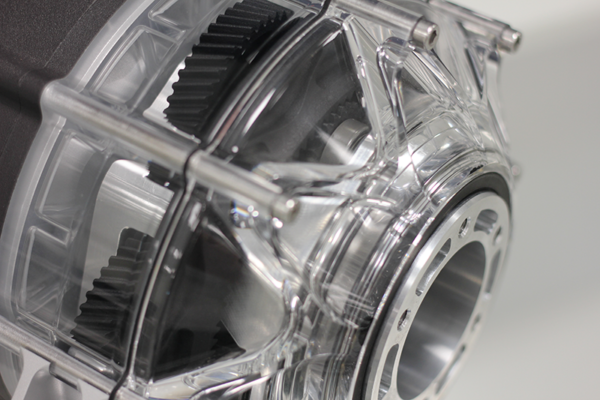
Yokeless Axial Flux Topology as the Driver for Future Powertrains
The unique selling proposition of yokeless axial flux machines over their state-of-the-art radial flux cousins are: Up to 3x the torque density Up to 2x power density Typically 1/3 of…
The Practice: Resolving the Challenges
The following blog post is the third in a 4-part series based on a paper presented at the 2023 CTI Symposium in Berlin by Traxial founder Peter Leijnen. See Part…
The Theory: Fundamental Advantages Delivering Substantial Performance Improvements in Axial Flux Motors
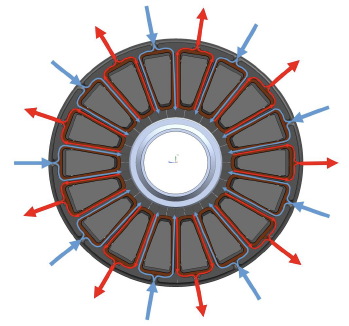
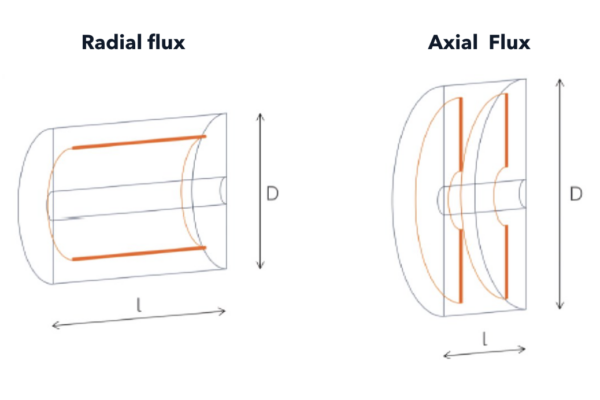
As explained in Part 1: Axial Flux versus Radial Flux, the flux path of yokeless axial flux machines is a lot shorter compared to a radial flux machine. In the…
Axial Flux Versus Radial Flux
Yokeless axial flux and radial flux permanent magnet machines have a lot in common. In fact, from an electromagnetic perspective, they are almost identical. Both work on the same electromagnetic…
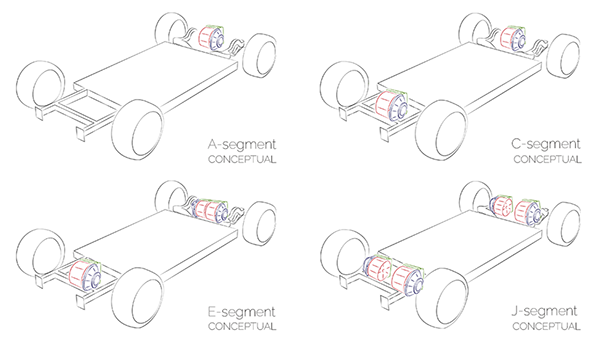
How modularity of integrated EDUs can power the mass adoption of EVs
The history of electric car technology started over 200 years ago but it’s only since the renewed interest in the last decade that we’ve witnessed several technological pushes. For powertrain…
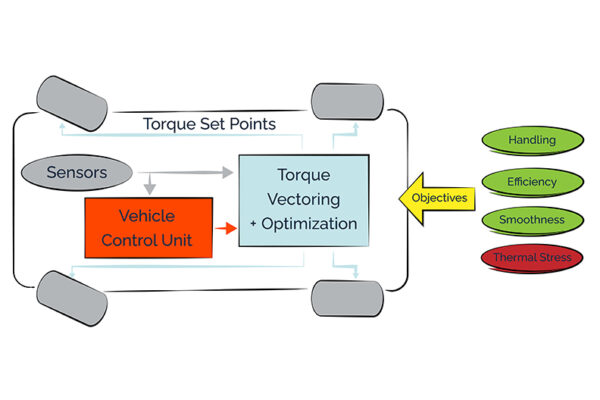
And onto Torque Vectoring, the Next Step in Electric Vehicle Design
In the first phase of vehicle electrification, the focus was on acceleration and speed. Nowadays, the design parameters go beyond performance and touch on requirements that should not only improve…

Axial Flux Motor: A Technology Made For Commercial Vehicles?
Future car sales have already been limited to emissions-free all-electric models by 2035 and we’re now also seeing several countries laying the first foundations toward zero-emission road mobility targets for…
Are Energy Costs Redefining E-Axle Requirements?
The first automobiles were introduced more than a century ago. Over the years, and like any other business, car manufacturers have had to adapt to market changes to retain their…
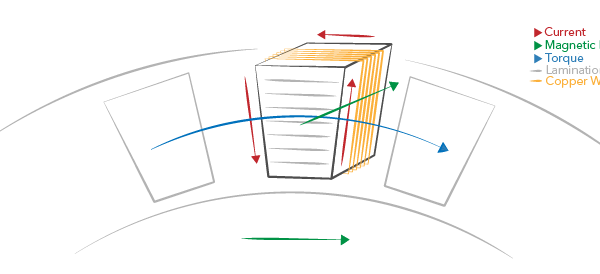
Axial Flux Motor vs Radial Flux Motor: A Focus on Magnetic Field Orientation
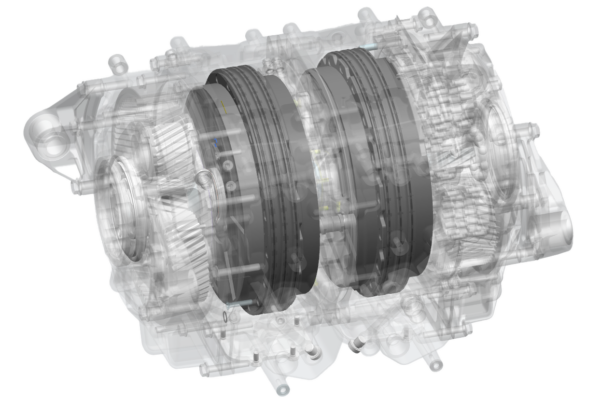
Compared to traditional radial flux electric motors used in the majority of automotive applications, axial flux machines, especially “single stator – double rotor” topologies, are more effective in an electromagnetic…
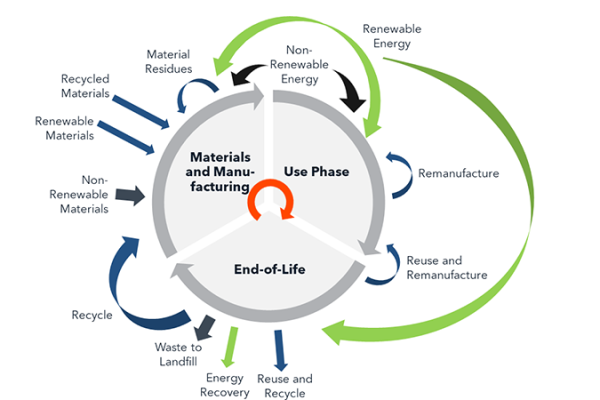
How a Traxial Motor Maximizes Resource Efficiency
Anti-EV provocateurs often refer to the total carbon footprint, where an electric car is only as green as the source of electricity the consumer uses to charge it, and where…